Promobot Education
Платформы
RoboxКомплект из сервопривода и датчика расстояния
V.4Лабораторный стенд Promobot
Программное обеспечение
RRStudioПростое написание алгоритмов
TestDevicesТестирование оборудования и проверка связи
Настройка WSL2Windows Subsystem for Linux
Поддержка
TelegramНаписать в чат технической поддержки
Руководство пользователя RRStudio
RRStudio - десктопное приложение предназначенное для управления Promobot Rooky и Promobot Robox с помощью алгоритмов Blockly.
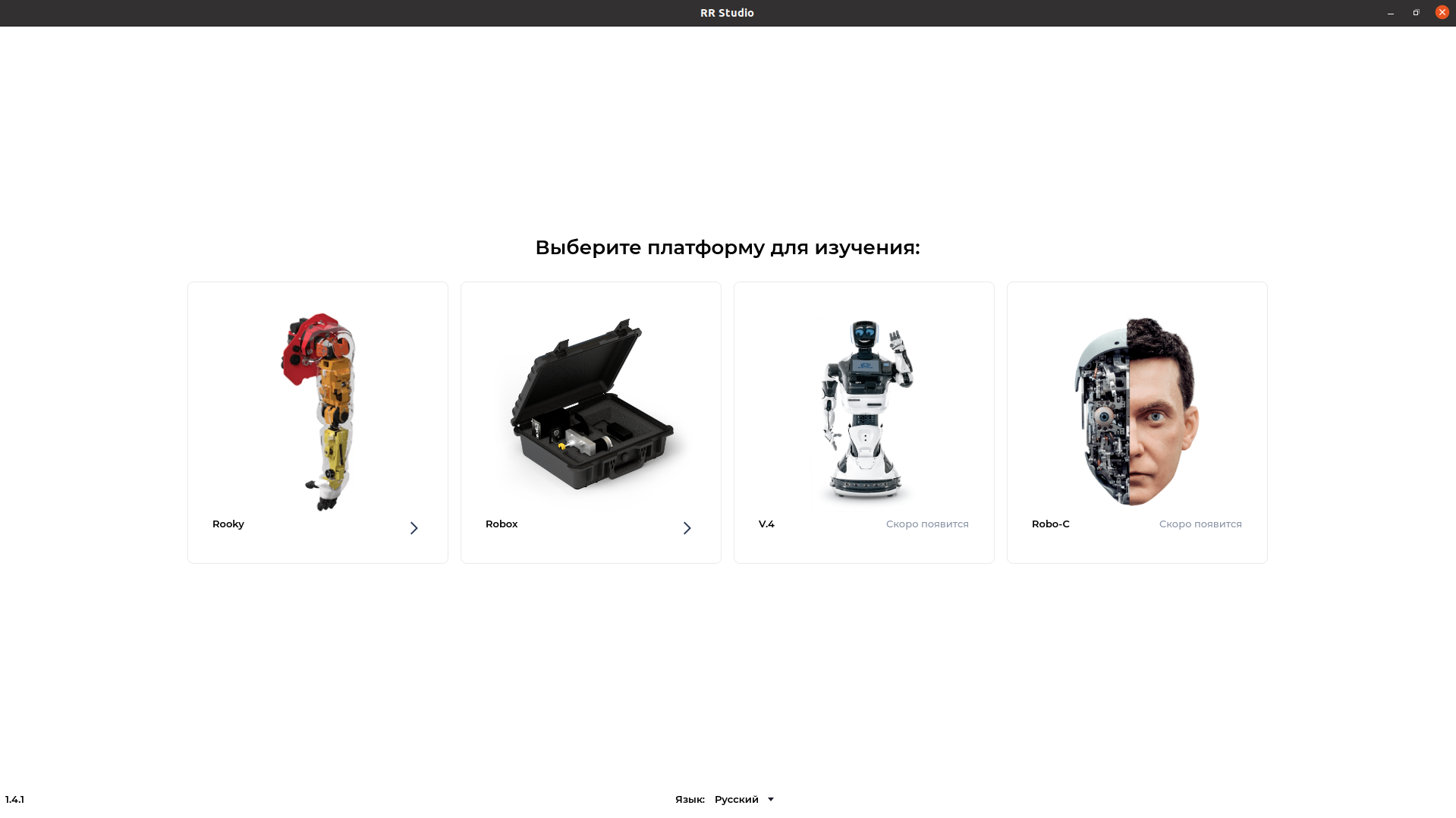
Главное меню (стартовый экран)
Главное меню позволяет выбрать платформу для работы: Rooky или Robox, сменить язык приложения. Также в левом нижнем находится версия приложения.
Rooky
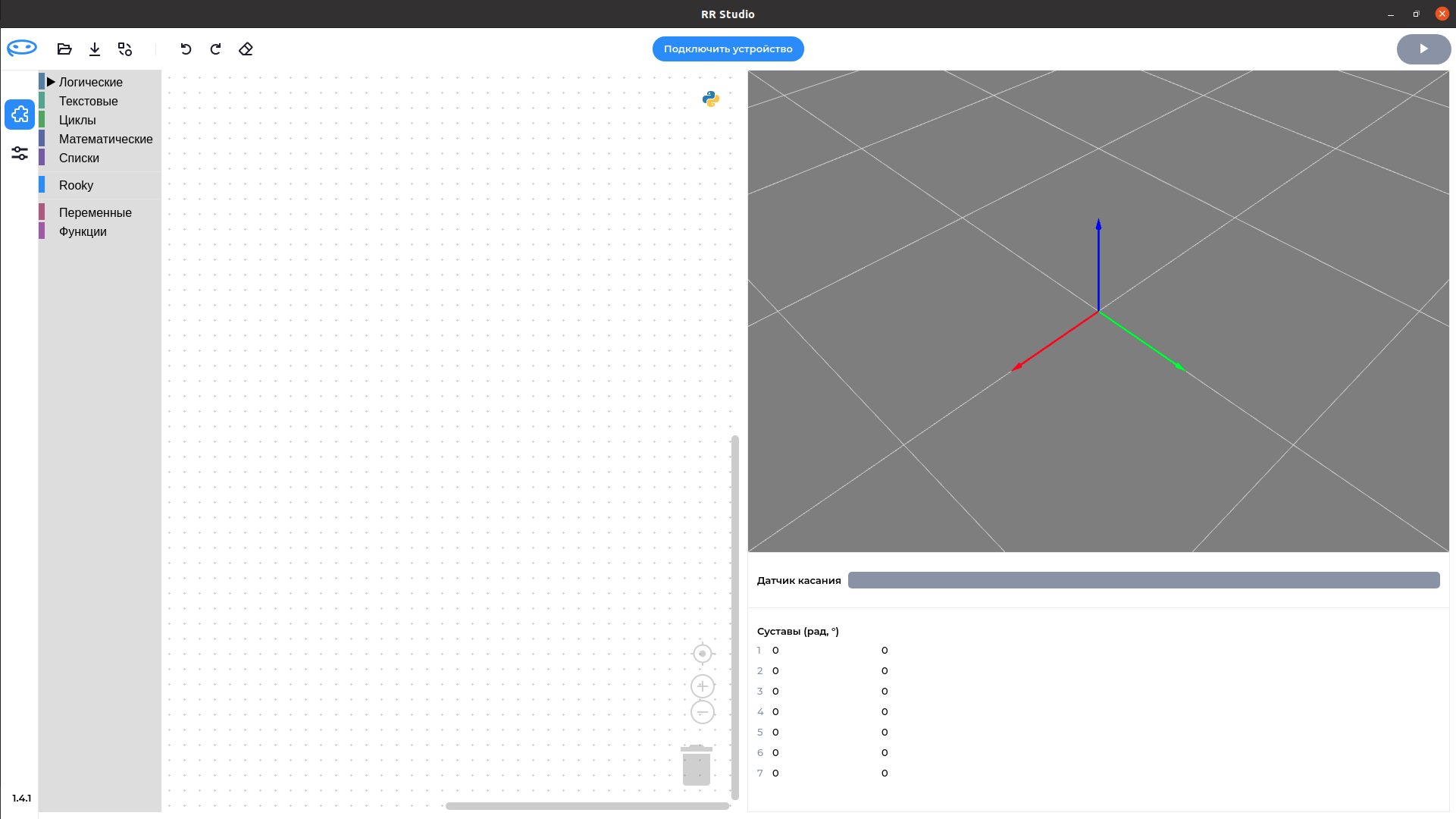
Рабочая зона Rooky представляет собой:
- сверху - функциональная зона с кнопками “Открыть проект”, “Сохранить проект”, “Сменить устройство”, “Отменить действие(Blockly)”, “Повторить действие(Blockly)”, “Очистить рабочую зону Blockly”, “Подключить устройство”
- слева - рабочую зону Blockly
- справа - сцену с 3D визуализацией Rooky, таблицу с текущими углами суставов.
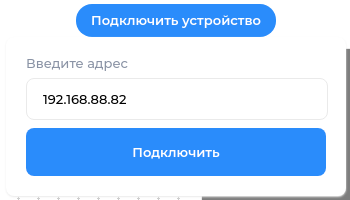
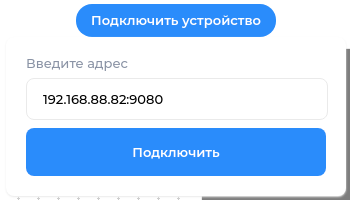
Подключить устройство
RRStudio подключается к Rosbridge по веб-сокету. Для этого вам нужно ввести ip-адрес сервера.
Опционально можно уточнить порт, если он не соответствует 9090
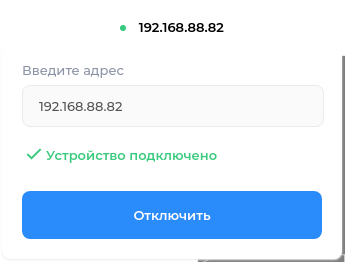
При успешном подключении появится сообщение “Устройство подключено”
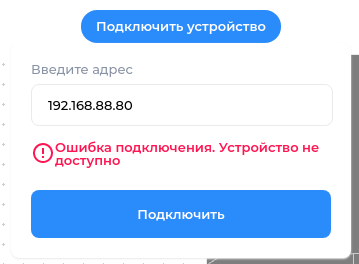
В случае ошибки появится сообщение “Ошибка подключения. Устройство недоступно”.
Известные причины ошибки подключения и способы исправления читайте в FAQ.
Функциональная зона

- “Открыть проект” открывает сохраненный на компьютере проект Blockly в формате .xml
Нельзя открыть файлы другого расширения или проекты, предназначенные для другой платформы. - “Сохранить проект” сохраняет проект с рабочей зоны Blockly в память компьютера в формате .xml
- “Сменить устройство” выходит из текущей рабочей зоны в главное меню.
- “Отменить” отменяет предыдущую команду.
- “Повторить” повторяет предыдущую команду.
- “Очистить рабочую зону Blockly” перемещает все блоки в корзину.

Кнопка заблокирована

Кнопка старта скрипта

Кнопка паузы скрипта (активна)

Кнопка остановки скрипта
Рабочая зона Blockly
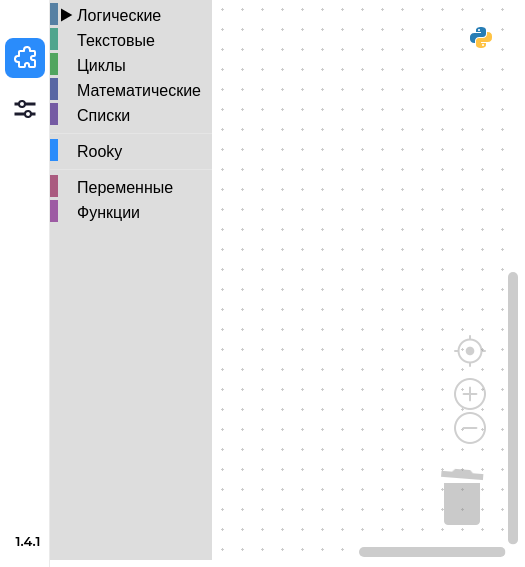
Blockly - сторонняя технология. Для обучения пользованию воспользуйтесь
готовыми туториалами
Блоки Rooky
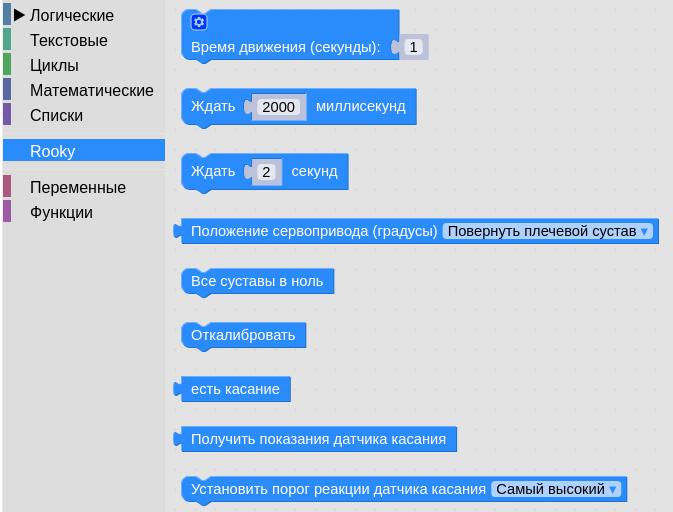
Движение суставов
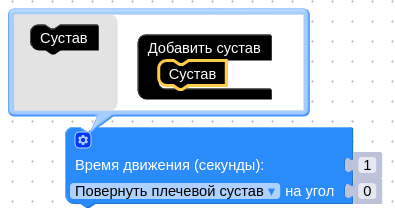
Блок управления движением руки.
Время движения (секунды): число > 0. Рука будет стараться достигнуть точки за это время, и рассчитает скорость
движения исходя из времени и расстояния, но скорость не будет быстрее максимально допустимой.
Блок может содержать несколько суставов, в данном случае движение этих суставов будет происходить параллельно.
| Название сустава | Номер | Диапазон движения |
|---|---|---|
| Повернуть плечевой сустав | 1 | -25..134 |
| Двигать плечевой сустав | 2 | -0..83 |
| Повернуть плечо | 3 | -89..83 |
| Двигать локтевой сустав | 4 | 0..80 |
| Повернуть локтевой сустав | 5 | -85..85 |
| Двигать запястье | 6 | -20..31 |
| Сжать/разжать пальцы | 7 | 0..74 |
Положение сервопривода

Возвращает число - значение текущего угла выбранного сустава.
Все суставы в ноль
Уводит руку в нулевое положение: задает всем суставам угол 0.
Откалибровать
Запускает калибровку руки.
Показание датчика касания / есть касание
“Есть касание” возвращает true, если считается, что касание происходит, false, если касания нет.
“Показание датчика касания” возвращает число - показания емкостного датчика касания.
Установить порог реакции датчика касания

Настроить чувствительность блока “есть касание”
Сцена с 3D моделью руки
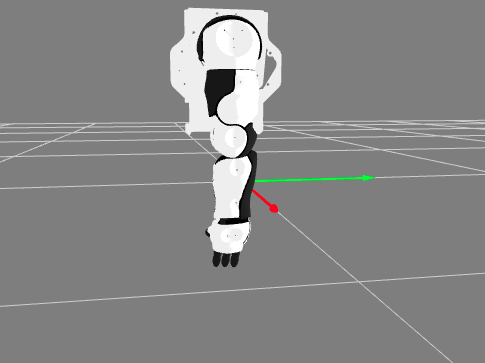
Отображает виртуальное положение руки.
Вращать камеру вокруг руки можно с помощью нажатие левой кнопки мыши и движение мыши.
Изменять масштаб возможно с помощью колесика мыши.
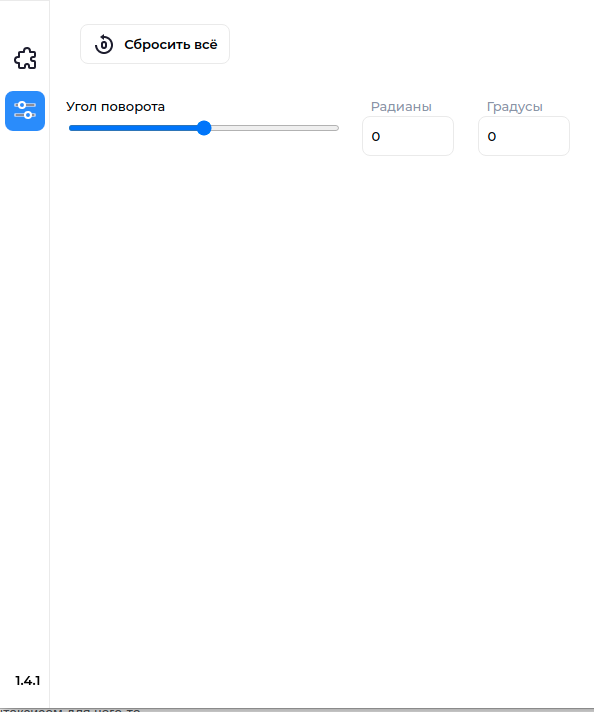
Ручное управление
Ручной режим позволяет двигать рукой, не создавая алгоритмов.
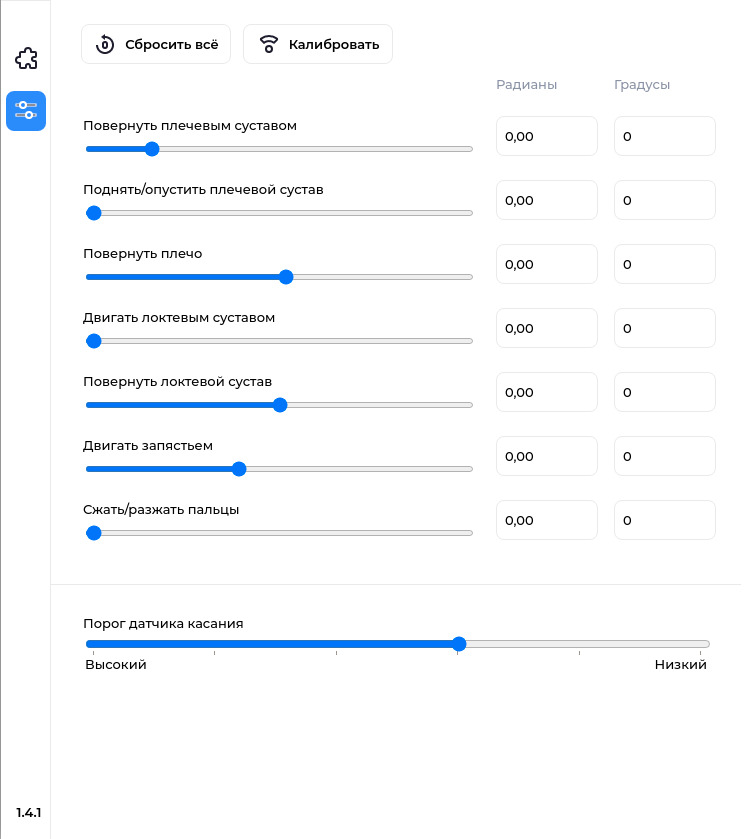
“Сбросить всё” - эквивалент блоку “Все суставы в ноль”.
“Калибровать” - эквивалент блоку “Откалибровать”.
С помощью ползунков и полей ввода можно подвинуть сустав на выбранный угол, либо задать порог датчика касания.
Будьте особенно внимательны, в ручном режиме рука не расслабляется от бездействия. Оставление руки может привести к
перегреву и поломке.
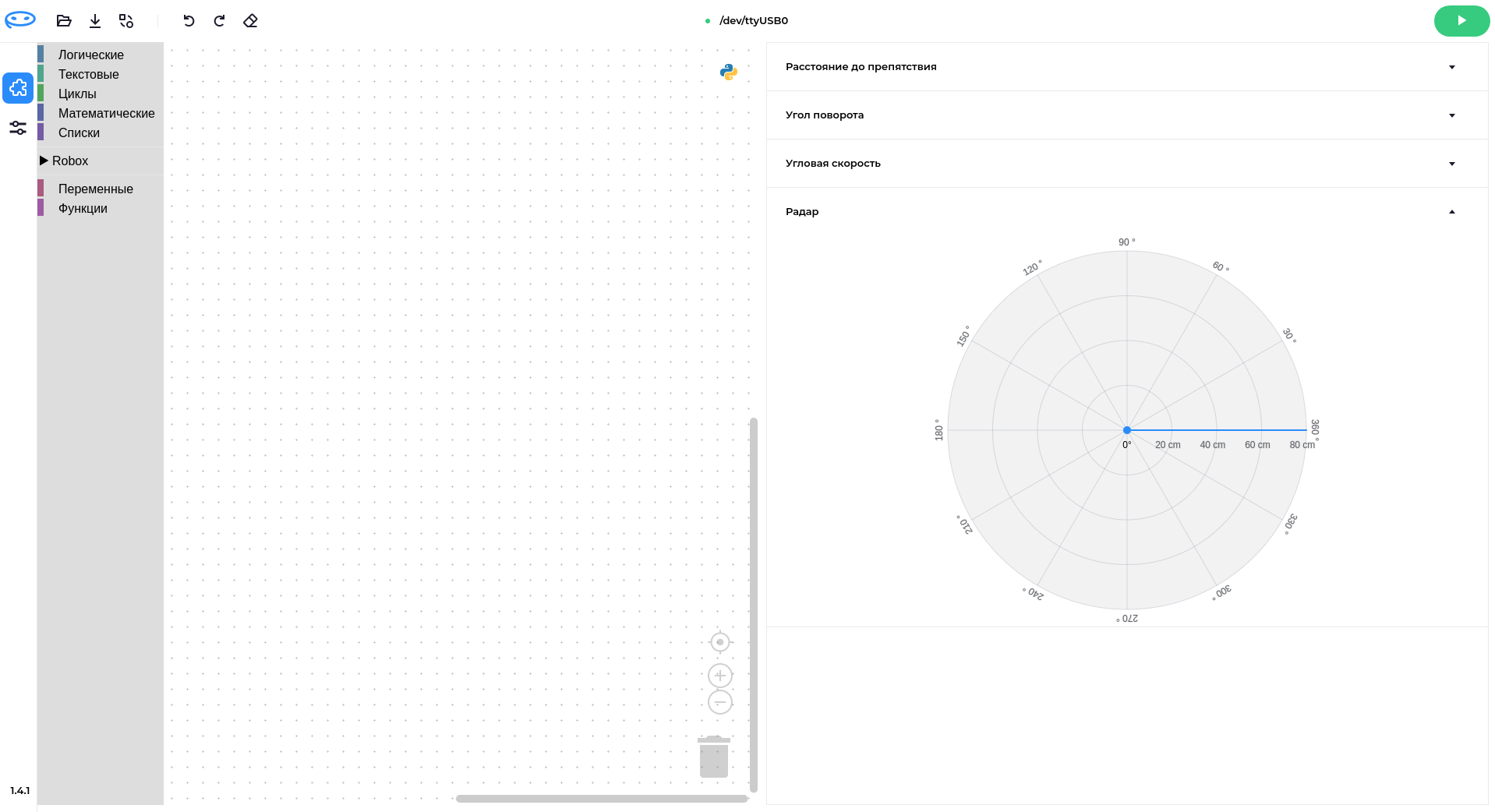
Robox
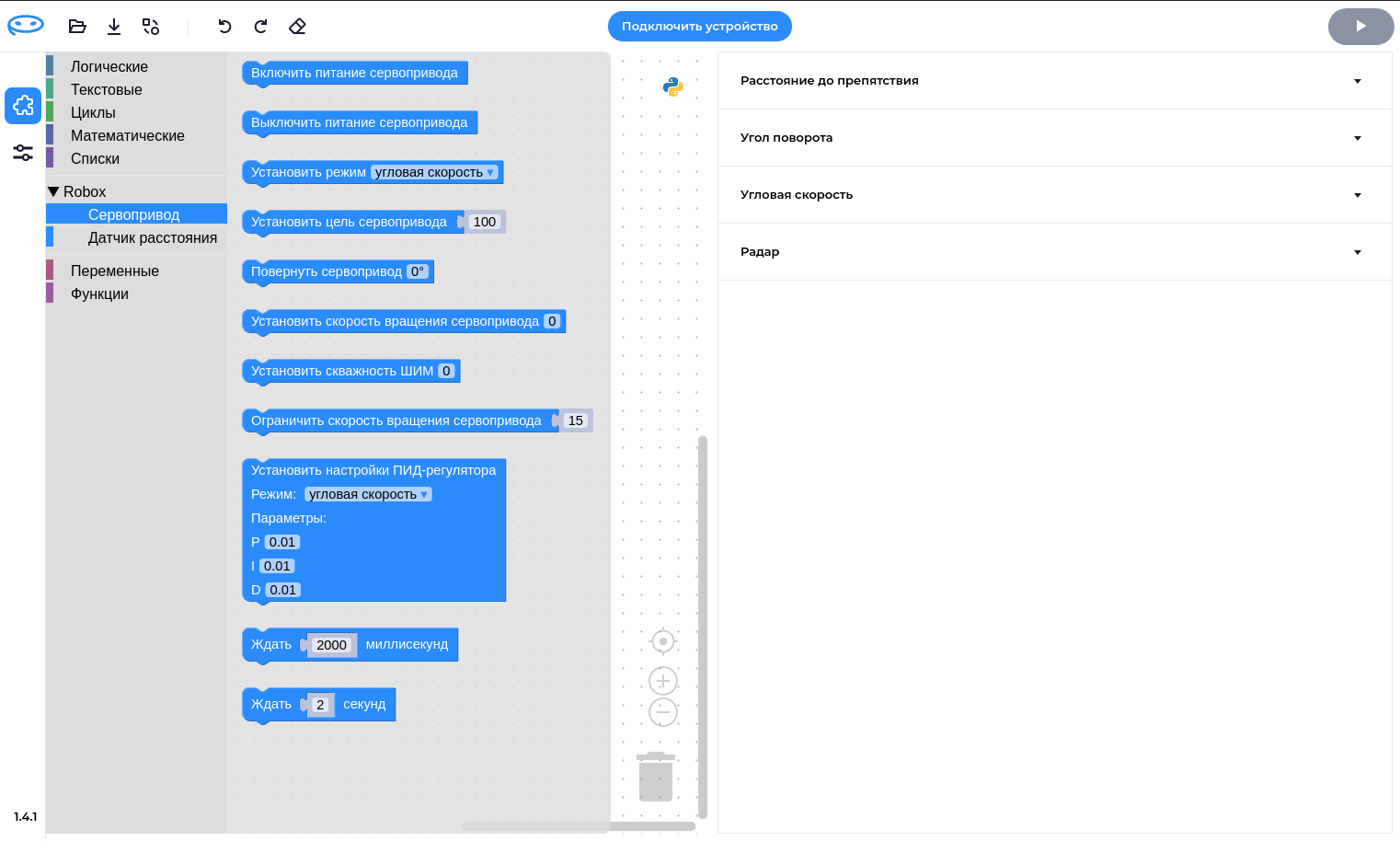
Рабочая зона Robox представляет собой:
- сверху - функциональная зона с кнопками “Открыть проект”, “Сохранить проект”, “Сменить устройство”, “Отменить действие(Blockly)”, “Повторить действие(Blockly)”, “Очистить рабочую зону Blockly”, “Подключить устройство”
- слева - рабочую зону Blockly
- справа - графики, отображающие информацию с Robox: расстояние, угол, угловая скорость, радар.
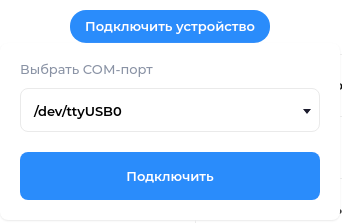
Подключить устройство
RRStudio подключается к Robox с помощью USB-соединения. Для этого подключите Robox к USB-порту компьютера и выберите нужное устройство в выпадающем списке.
Известные причины ошибки подключения и способы исправления читайте в FAQ.
Рабочая зона Robox
Blockly - сторонняя технология. Для обучения пользованию воспользуйтесь готовыми туториалами
Блоки Robox
Важно понимать, что блоки предназначены для записи значений в регистры Robox. Абсолютно нормально поведение, когда сервопривод продолжает работать после закрытия RRStudio. Поэтому не забывайте отключать Robox после работы.
Включить/выключить питание сервопривода
Включает или отключает питание на сервоприводе. Без включенного питания сервопривод продолжить принимать команды, позволит переписывать регистры, но двигаться не будет.
Установить цель сервопривода

Принимает целое число. Задает целевое значение сервопривода (угол, скорость или ШИМ). В зависимости от режима работы.
Угол
Принимает целое число от -32768 до +32767.
Устанавливает целевой угол в диапазоне от -720° до 720°.
Угловая скорость
Принимает целое число от -24 до 24.
Задает угловую скорость вращения сервопривода в оборотах в минуту.
ШИМ
Принимает число от 0 до 1000.
Задает напряжение серводвигателя в процентах. Установленное в блоке значение приводится к процентам с помощью умножения
на 0.1
Установить режим
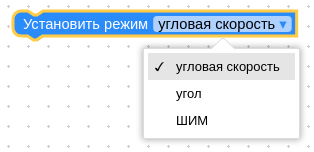
Задает режим работы сервопривода
Ограничить скорость вращения сервоприводах

Ограничивает скорость вращения в режиме работы по углу.
Установить настройки ПИД-регулятора
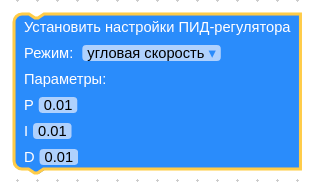
Задает настройки ПИД-регулятора, принимает числа от 0 до 50
Сканировать
Возвращает массив из двух чисел, где первое - показание ИК датчика в см, второе - показание УЗ датчика в см.
Если показаний нет, вместо числа возвращается null.
Очистить радар
Очищает поле радара от меток.
Повернуть сервопривод
Синтаксический сахар для блоков “Установить режим работы(угол)” + “Установить цель”
Установить скорость вращения

Синтаксический сахар для блоков “Установить режим работы(угловая скорость)” + “Установить цель”
Установить скважность ШИМ

Синтаксический сахар для блоков “Установить режим работы(ШИМ)” + “Установить цель”
Ручное управление
“Сбросить всё” - сбрасывает сервопривод к заводским настройкам. С помощью ползунков и полей ввода можно задать цель сервоприводу, не создавая алгоритмов.
FAQ
Rooky
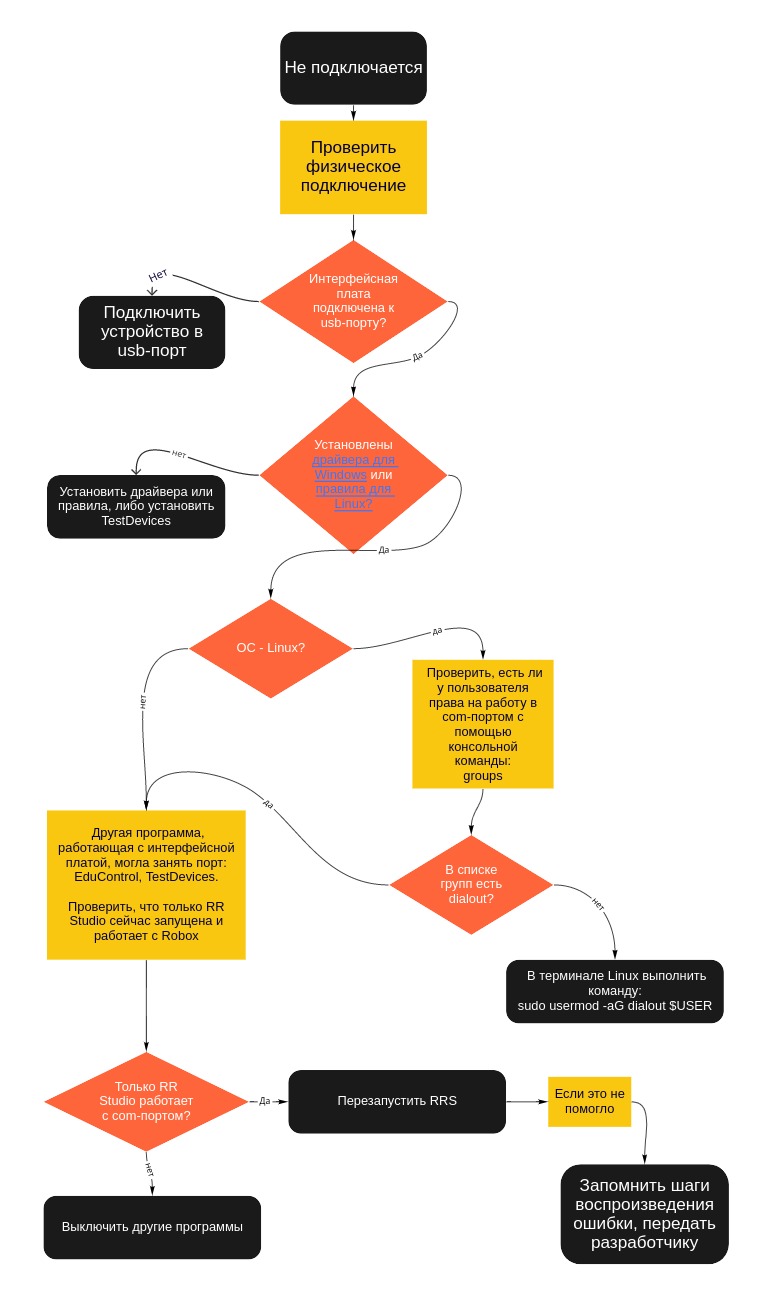
Не подключается

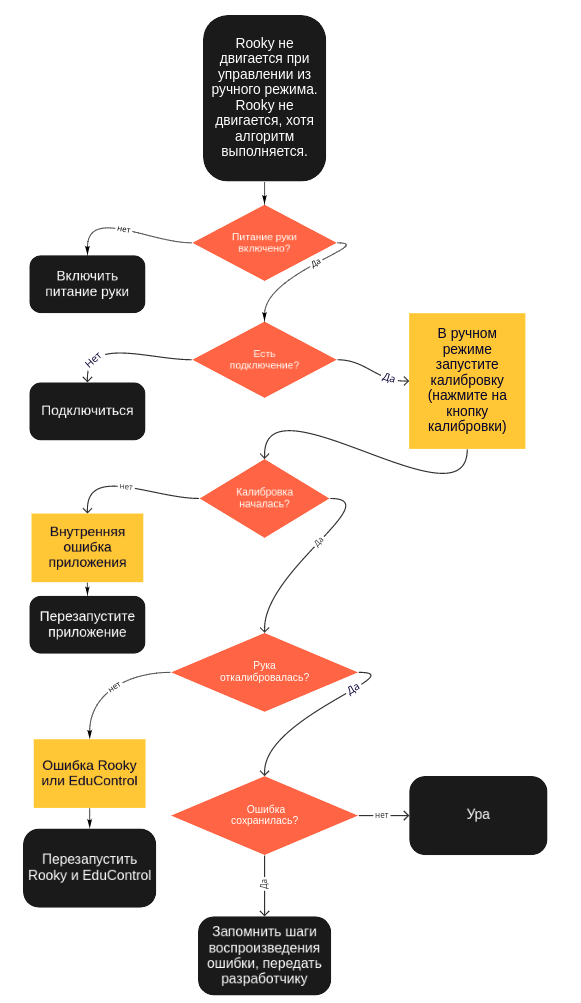
Rooky не двигается
Robox
Не подключается