Promobot Education
Платформы
RoboxКомплект из сервопривода и датчика расстояния
V.4Лабораторный стенд Promobot
Программное обеспечение
RRStudioПростое написание алгоритмов
TestDevicesТестирование оборудования и проверка связи
Настройка WSL2Windows Subsystem for Linux
Поддержка
TelegramНаписать в чат технической поддержки
Лабораторный стенд Promobot V.4

Лабораторный стенд Promobot V4 - это многофункциональная роботизированаая платформа для изучения робототехники.
Она включает в себя множество исполнительных узлов: платформа передвижения робота, сервоприводы и датчики препятствий, лидар и пр. Коммуникация с компонентами организована с помощью распространенной сенсорной сети Modbus. Открытый коммуникационный протокол Modbus, широко применяется в промышленности для обмена измерительной и управляющей информацией электронными устройствами. Навыки работы с данным протоколом и изучение смежных технологий востребованы как в промышленности, так и в отрасли встраиваемых систем, в целом. Существующая база сенсоров и устройств робота позволяет освоить базовые навыки работы с исполнительными узлами в сенсорной сети.
Общие сведения
Для работы с платформой Promobot V4 возможны два варианта подключения к системам робота:
- Работа непосредственно с экрана робота
- Работа по протоколу SSH
Робот базируется на фреймфорке ROS (Robot Operating System)
Основные принципы работы с ROS можно узнать в документации сообщества - http://wiki.ros.org/
Подключение к системам непосредственно с робота
- Зайдите в сервисное меню робота(пароль от сервисного меню уточнять в технической поддержке Promobot)
- Нажатием кнопки “Свернуть” скройте GUI (пользовательский интерфейс) робота
- В верхнем левом углу нажмите на надпись “Activities)
- Нажмите на иконку Терминала
Подключение к системам робота по протоколу SSH
Для подключения к роботу потребуется узнать его IP адрес в вашей локальной сети. Сделать это можно в интерфейсе робота.
- Зайдите в сервисное меню робота(пароль от сервисного меню уточнять в технической поддержке Promobot)
- Если вы находитесь на стартовом экране робота, нажать на кнопку “УПРАВЛЕНИЕ”
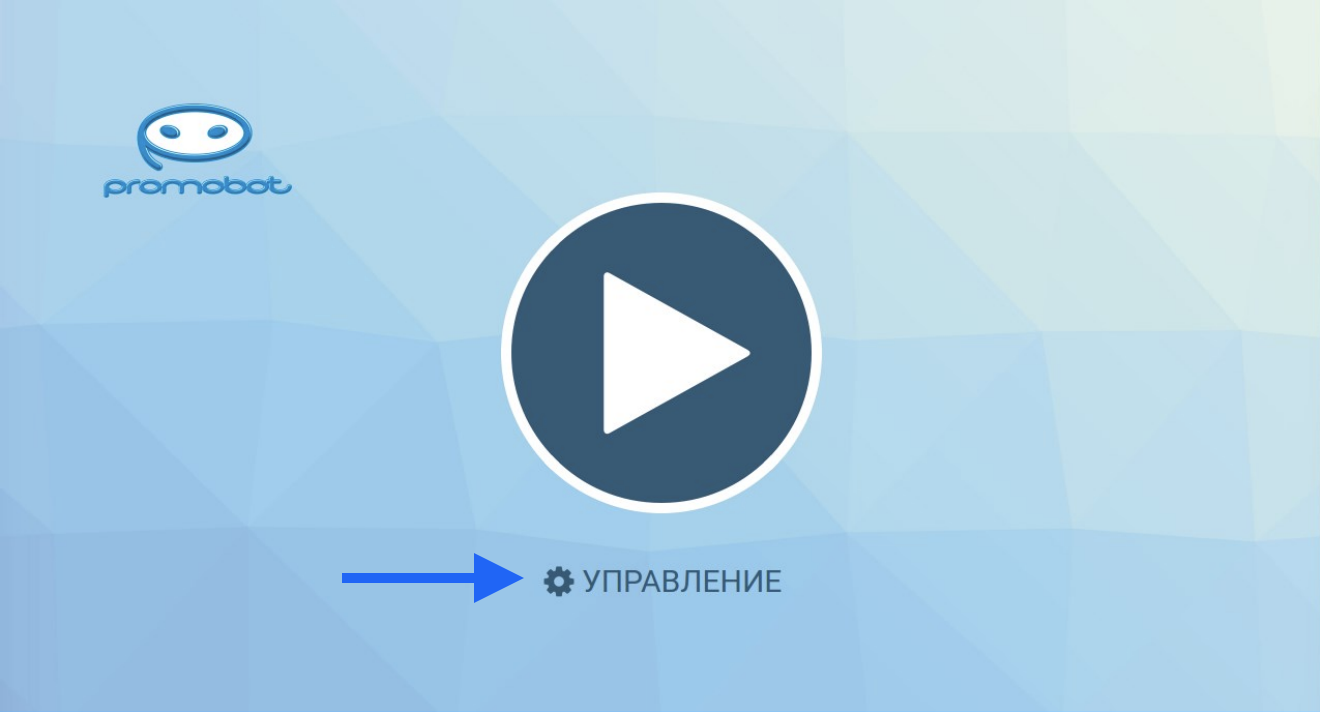
- Если вы находитесь на основном экране робота, необходимо произвести четырехкратное нажатие в область, указанную на изображении ниже:

- Если вы находитесь на стартовом экране робота, нажать на кнопку “УПРАВЛЕНИЕ”
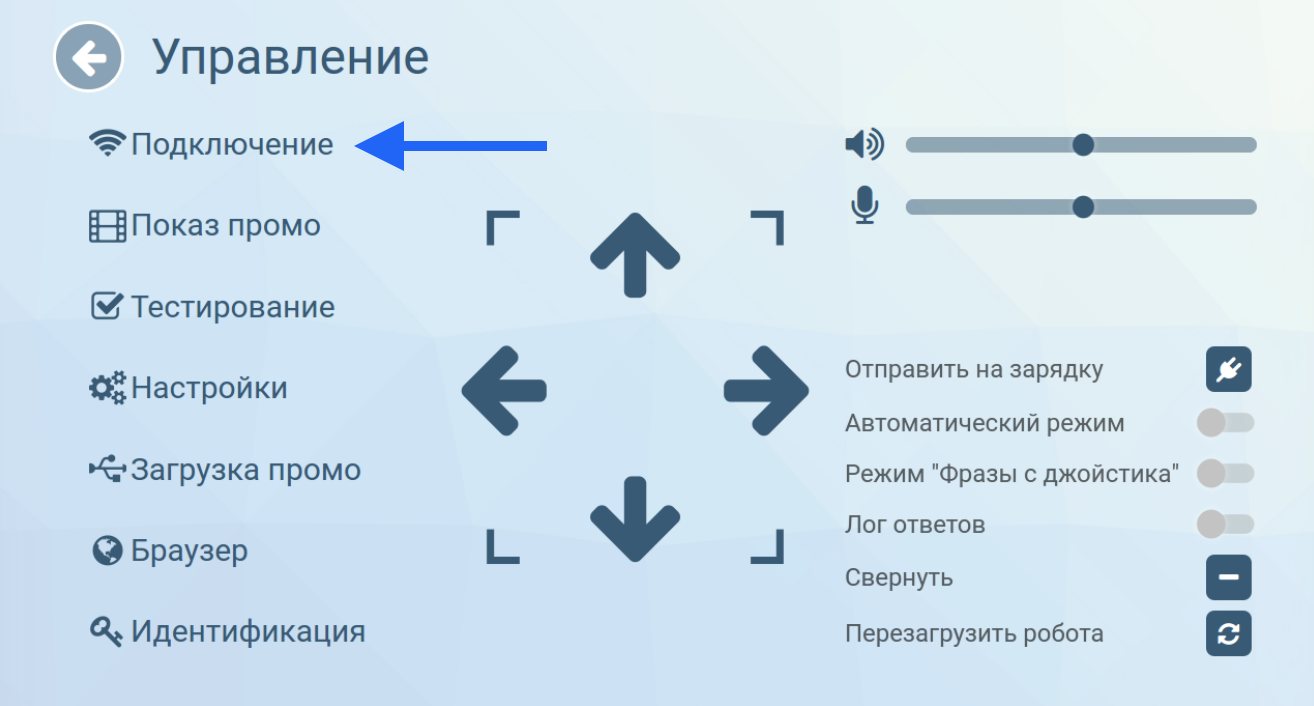
- Перейдите в раздел “Подключение”
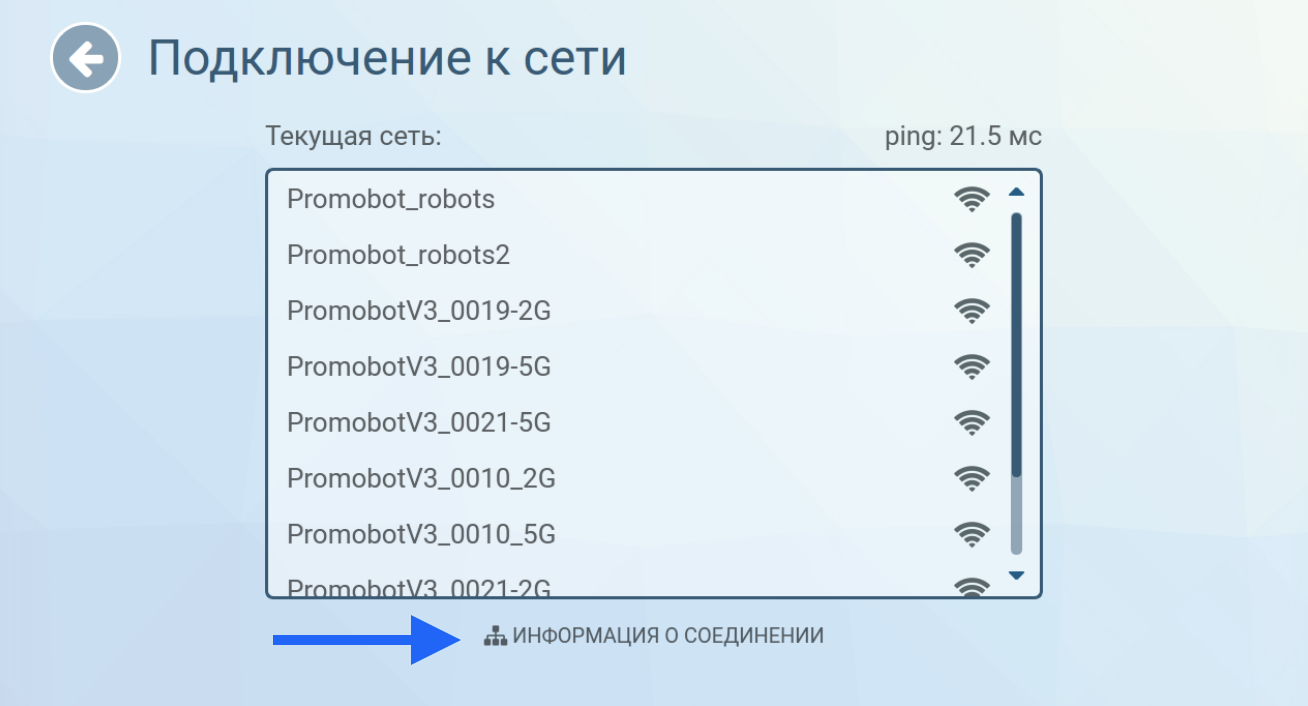
- Нажмите “Информация о подключении”
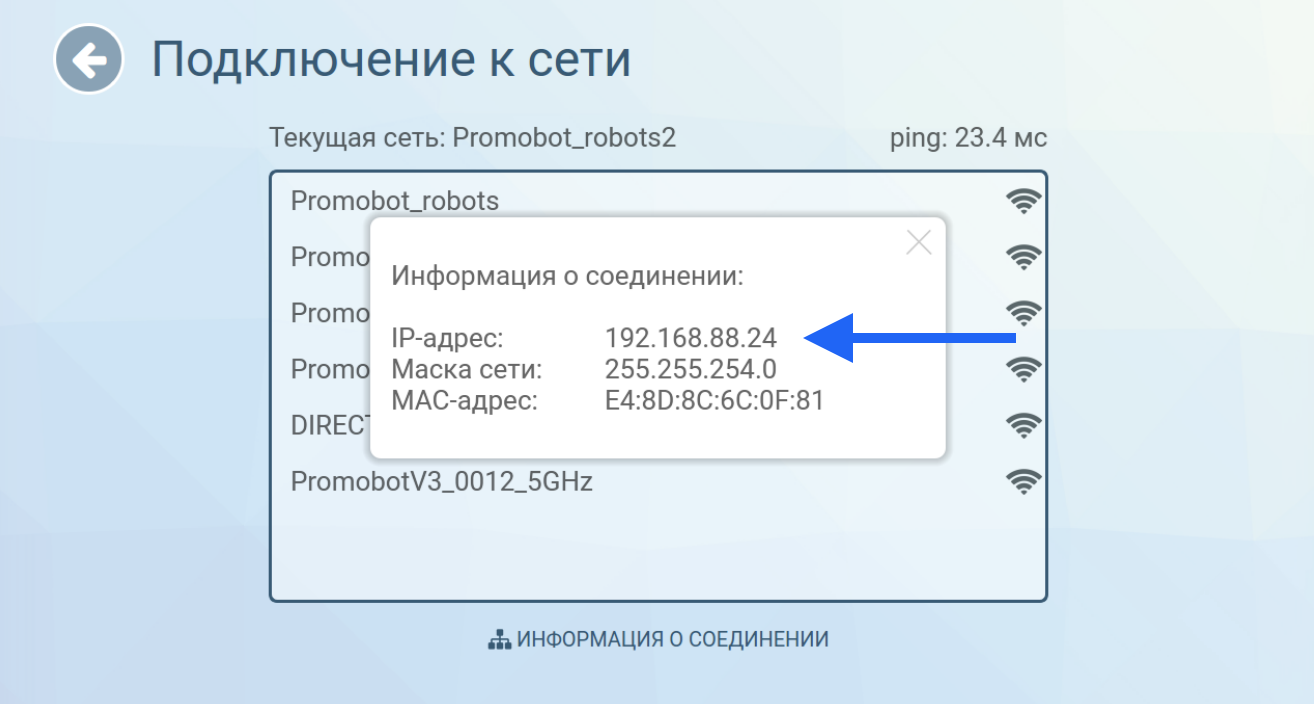
- Спустя несколько секунд на экране отобразится IP адрес робота внутри локальной сети. Используйте его для дальнейшего подключения
Чтобы подключиться к роботу, используйте любой доступный SSH клиент (например Putty).
Информация для подключения:
Порт: 22
Логин: Уточнить в технической поддержке Promobot или у научного руководителя (если вы являетесь учащимся образовательного учреждения)
Пароль: Уточнить в технической поддержке Promobot или у научного руководителя (если вы являетесь учащимся образовательного учреждения)
Полезные ссылки
ℹ️ Работа с основными топиками робота
ℹ️ Кинематические схемы робота
ℹ️ Пример подключение к шине робота посредством ModBus протокола