Promobot Education
Платформы
RoboxКомплект из сервопривода и датчика расстояния
V.4Лабораторный стенд Promobot
Программное обеспечение
RRStudioПростое написание алгоритмов
TestDevicesТестирование оборудования и проверка связи
Настройка WSL2Windows Subsystem for Linux
Поддержка
TelegramНаписать в чат технической поддержки
Датчик расстояния
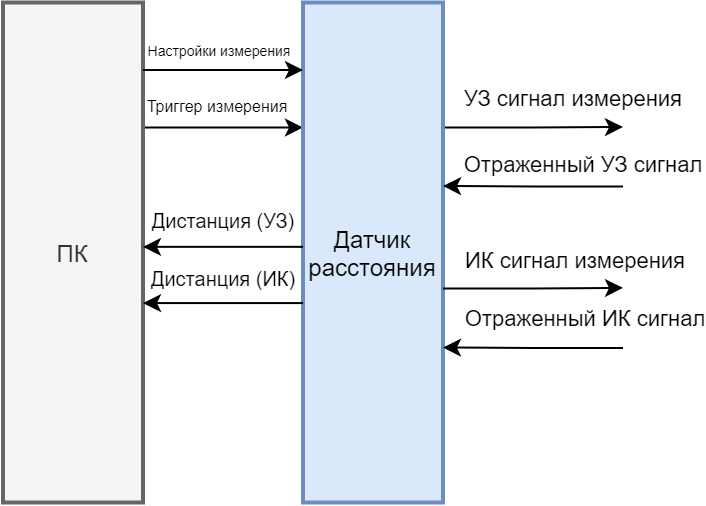
Датчик расстояния Promobot предназначен для детектирования препятствий и последующего определения расстояния до них. В данном устройстве используются как ультразвуковые (УЗ) сигналы измерения, так и инфракрасные (ИК)
| Основные характеристики датчика: | |
|---|---|
| Микроконтроллер | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| Напряжение питания | 12 В |
| Ном. потребление (без нагрузки) | 70 мА |
| Частота УЗ-сигнала. | 40 кГц |
| Рабочий угол измерения (УЗ) | 30 º |
| Макс. измеряемое расстояние (УЗ) | 300 см |
| Мин. измеряемое расстояние (УЗ) | 4 см |
| Длина волны ИК-излучател | 940 нм |
| Макс. измеряемое расстояние (ИК) | 200 см |
| Мин. измеряемое расстояние (ИК) | 2 см |
| Рабочий угол ИК-излучателя | 35 º |
| Рабочий угол ИК-приемника | 25 º |
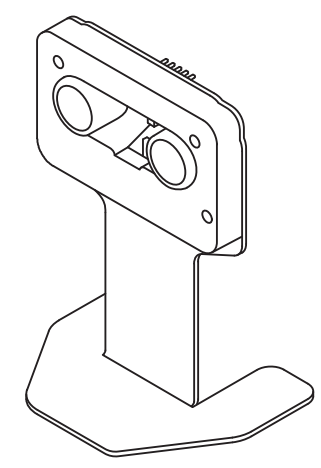
Внешний вид платы датчика расстояния

Структура типового взаимодействия с датчиком расстояния: